High-speed Bouncing Ball¶
Introduction¶
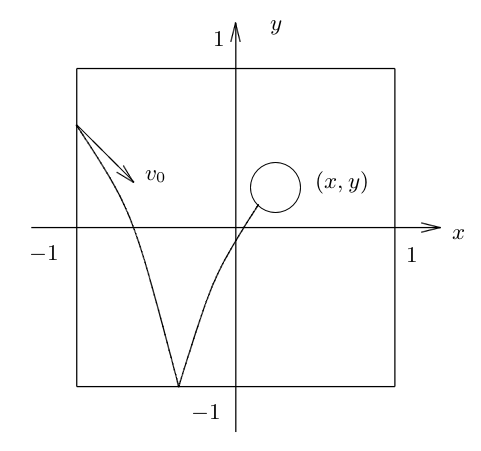
This application note describes the simulation of a ball bouncing in a box. Using high-speed integration, a flicker-free oscilloscope display of the ball’s path can be easily obtained. Figure [pic_movement] shows the basic idea of the simulation: The bounding box is assumed as \(\left[-1:+1\right]\times\left[-1:+1\right]\), and the position of the ball within this box is described by the coordinate tuple \((x,y)\). At the start of a simulation run, the ball can have two initial conditions, an initial velocity \(v_0\) (which is not used in the example below), and an initial \(y\)-position \(y_0\), set to \(1\) in the following.
The \(x\)- and \(y\)-components of the ball’s position are assumed as being completely independent, so they can be generated by two separate computer circuits. The \(x\)-component of the ball’s velocity is assumed to decrease linearly over time. The actual \(x\)-position of the ball is derived by integrating over its velocity. Every time the ball hits the left or right wall of the box, it changes its direction (i. e. it is reflected by the wall).
The \(y\)-component is that of a free-falling ball which bounces back elastically when hitting the floor. Figure [pic_xy] shows those two variables over time as displayed on an oscilloscope: Starting from the left, the computer is first in IC-mode. As soon as the OP-mode starts, the ball begins to drop until it hits the floow while the \(x\)-component increases linearly (trace in the middle) until it reaches the right wall etc.
|

|
Movement of the bouncing ball |
x- and y-component of the bouncing ball |
|
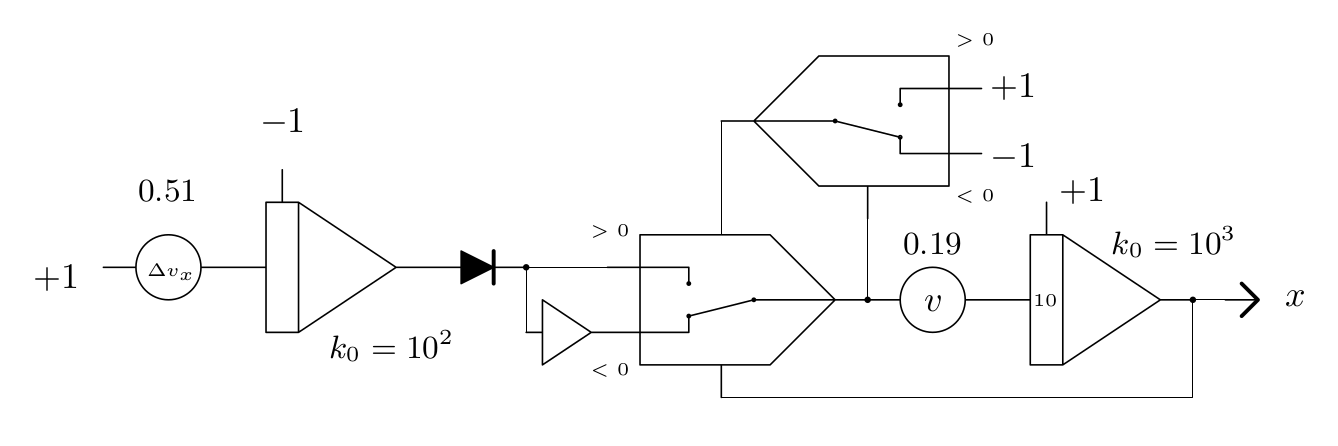
Generating the x-component |
Programming and results¶
Figure [pic_x_circuit] shows the computer setup to derive the \(x\)-component of the ball’s position. At the output of the leftmost integrator is the velocity \(v_x\) of the ball which starts at \(+1\) and decreases linearly, controlled by the \(\Delta v\)-potentiometer. (The diode at the output of the integrator is not really necessary but it makes setting up parameters a bit more easy as it prevents a negative velocity.)
The sign-reversal of the \(x\)-component of the ball, triggered by hitting the left or right wall, is implemented by two comparators: One switches between the normal or inverted output of the left integrator while the other one yields the comparison value to detect the two walls of the box. The integrator on the right yields the \(x\)-component by integrating over \(v_x\). Its output is fed to the \(x\)-input of an oscilloscope set to \(X/Y\)-display mode. The time-constants of the integrators are set to \(10^2\) and \(10^3\) respectively.
The \(y\)-component of the ball’s movement can be described by the following differential equation:
The case \(y>1\) cannot happen in this simulation as there is no initial velocity of the ball to be taken into account. At the beginning of a simulation run, the ball starts falling due to gravity \(g\). It is decelerated by air friction which is proportional to its velocity \(\dot{y}\). This damping coefficient will be denoted by \(d\) in the following.
When the ball hits the floor of the box it will rebound due to elastic collision described by the term \(c(-y+1)\) with a constant \(c\).
Figure [pic_y_circuit] shows the corresponding computer setup. The leftmost integrator integrates over the gravity \(g\) and also takes the air friction \(d\) into account. It yields the negative \(y\)-component \(v_y\) of the ball’s velocity. The integrator on the right integrates over \(v_y\), yielding the actual \(y\)-position.
The elastic rebounce is implemented by means of two diodes. The “active” element here is the \(10\) V Zener-diode which starts conducting when the ball hits the floor of the box. The diode on the left makes sure that the Zener-diode won’t conduct while the ball is within the box. Since the rebound effect is rather violent, the output of the two diodes connected in series is directly connected to the summing junction input (SJ) of the first integrator. The time-constants of the integrators are both set to \(10^2\).
Figure [pic_setup] shows the setup of this program on a small Analog Paradigm Model-1 analog computer. The two circuits described above are implemented using differently colored patch cables. The black cables correspond to the \(x\)-circuit while the orange wires implement the \(y\)-circuit.
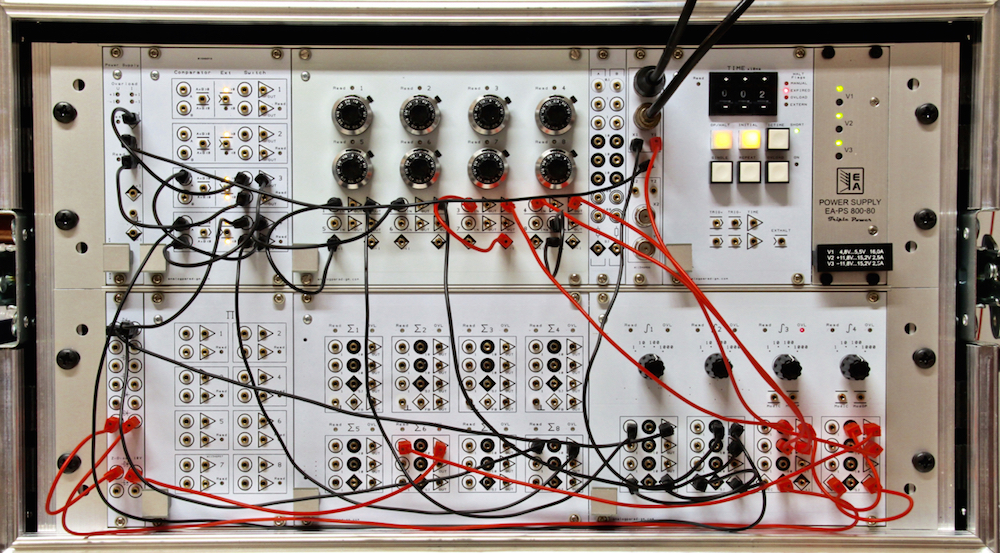
Setup of the bouncing ball problem on an Analog Paradigm Model-1 analog computer
With the settings as denoted in the circuit diagrams and the computer set to repetitive operation with an OP-time of \(20\) ms and short IC-time, a display such as that shown in figure [pic_bb] can be easily obtained. Since the oscilloscope used has no blanking-input, the return of the beam to the upper left corner is faintly visible. If a blanking-input is available it can be connected to the TRIG+ or TRIG- output of the CU to avoid this artifact.
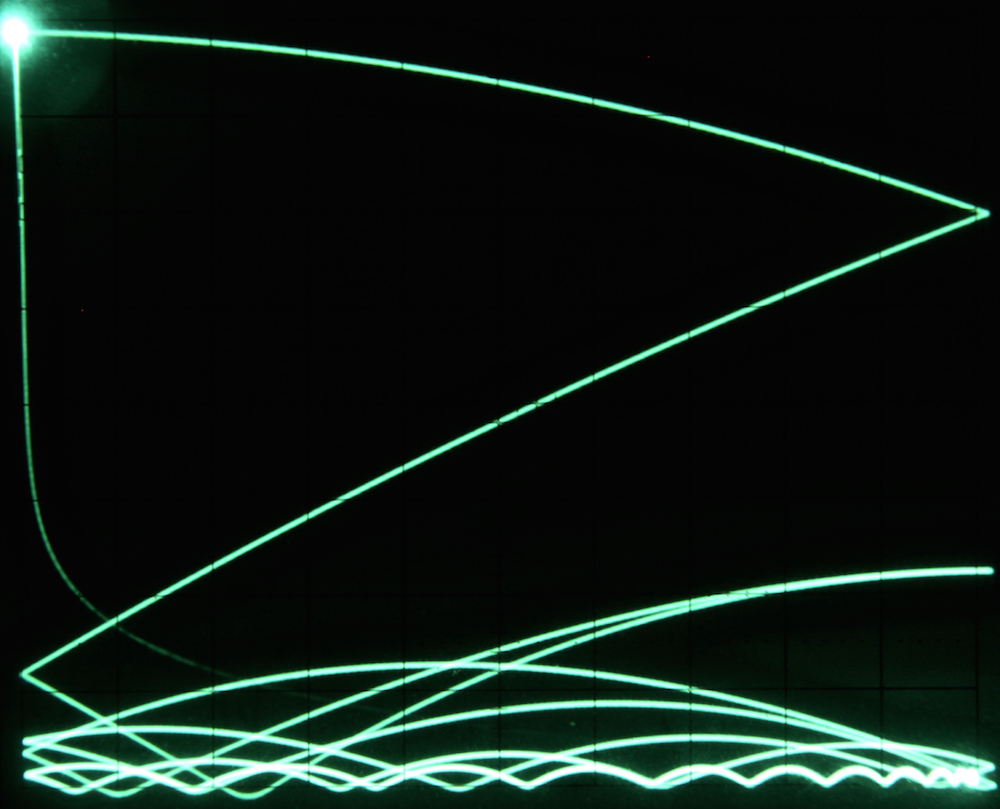
Trace of the bouncing ball¶